The Road to Autonomous Driving Begins With Parking

Driving. People will often talk about it in terms of passion, freedom, ingenuity, performance.
But parking? You’ll never hear anyone rhapsodize about circling for a spot. Drivers in the U.S. spend an average of 17 hours a year looking for parking spots, resulting in $345 per driver in terms of emissions, lost time, and fuel. In Nairobi, Kenya expects to spend 31.7 minutes circling for a spot, and not much less in Beijing, Bangalore, and Buenos Aires.
30 percent of traffic congestion in cities is caused by parking and 27 percent of us will get into arguments over parking spots on average once during the year. A surprisingly large number of insurance claims take place in parking lots with a rise in mishaps coinciding with Black Friday.
Parking also takes up lots of space: 14 percent of Los Angeles is given over to it.
The story is strikingly similar for managed fleet vehicles. Besides parking and storage space, marshalling these vehicles and getting them ready for daily operations is a repetitive, resource-constrained process.
Now here’s the good news: developing and implementing technology for autonomous parking and lot movements in a safe, cost-effective, and user-friendly way is more tangible than fully automated driving anytime, anywhere. Cars move more slowly in parking lots and, while there are more pedestrians, it is a more constrained, controlled environment.
The challenges they encounter in these environments are plentiful, but not insurmountable using a combination of perception, detection, deliberation and measured action. Repeatable and predictable measured actions result in fortification of public trust and wider acceptance.
This I believe is a necessary psychological step. When you talk to individuals about autonomous cars, they tend to be entranced, but wary. Autonomous parking will become a way to test the technology, test the boundaries of operations and acclimate manufacturers, drivers, public officials, and pedestrians with the future while at the same time eliminating what can be the worst part of their day.
From Zero to 5 MPH
I founded STEER, an automotive technology company that develops automated parking and low-speed movement solutions, in 2016 to take on these exact problems. I wanted to develop a narrow application of automated driving that was built secure like Fort Knox but functioned like a horizontal that can be applied to many areas.
Since then, we’ve completed the first version of our system, which is being used by fleet car owners in the Washington D.C. area. It works with fossil fuel, electric and alternate fuel vehicles and on light, medium-duty and specialty vehicles. Now we’re expanding to more cities. We’re also interfacing with select OEMs and moving toward an add-on kit for consumers later this year. The system will work with most cars built since 2014, but more than 80 percent of our customers own vehicles between 2017-2021.
We’ll also likely be adding parallel parking in the future: we can actually parallel park now but want to bring it to the same maturity levels as our original features before releasing to market.
You can check out how the system operates at one of our favorite test tracks, a parking lot at a Washington D.C. area Trader Joe’s.
Under the hood

The first conclusion my team and I came to in outlining the requirements of the system was that driverless parking cars have to truly be autonomous when in that mode. That means not being able to depend on sensors embedded in Botts’ dots or specialized garages. That means having all the decision-making capability internally before they start. That means knowing how to react to every possible situation that they find themselves in. Convenience could never compromise safety. Safety for pedestrians, other drivers, passengers, infrastructure, and vehicles is the overriding mission.
Second, we realized to make them economical and reliable we had to rely as much as possible on the existing technology inside the car, and not lower the reliability in any way. This approach also makes it easy to interface with manufacturers without having to modify production systems and processes.
And third, we concluded that the best way to make tangible progress would be to think like laptop or smartphone designers: broad system building blocks but deliberate choices that keep the application narrow. Make incremental gains and succeed from the bottom up.
Our system consists of three elements: an in-car control system powered by an Arm Cortex processor, a tri-modal sensor suite (camera, radar, ultrasonic) and MapprTM , our artificial intelligence (AI) software for mapping parking lots.
AI meets drive-by-wire for autonomous parking
The control system plugs directly into a car’s drive-by-wire system for controlling brakes, steering, acceleration, and other critical functions. Unlike a Level 5 street autonomous car, we don’t use AI to control a car. If you’ve followed the evolution of autonomous driving, you’ll know that this remains an enormous technical challenge: the algorithms nor the data infrastructure are in place yet.
Drive-by-wire systems are more conservative by nature: they make predictable decisions in the face of ambiguity.
We developed our own system for greater compatibility across makes and models and greater performance. While the driving control system and first- and second-order braking systems do not rely on AI, the vision system we use for added situational awareness and safety uses a sophisticated AI computer vision system running a quad-core Arm Cortex-A57 processor, Nvidia Maxwell GPUs and a few gigabytes of RAM.
MapprTM, meanwhile, effectively maps the parking lots our drivers enter. It combines their own experiences along with understanding about the general layout of parking lots and information becomes cumulative. It will also reject data and tell a driver it needs to try again. We found this participatory element of AI has great appeal. Consumers realize they have a hand in informing the system.
The valet experience
There are two core modes for autonomous parking. The first, Level 2 Valet, parks a car in a tight space. The driver gets out, engages the app on his or her phone and the car pulls into the space. When he or she wants to leave, it pulls out. In Level 4 parking, a driver drives up to the designated drop-off spot (usually the entrance, but outside of fire zones and handicap spaces), gets out, engages the app and the car finds a spot on its own. When he or she wants to go home, the car can be summoned with the app. Safety checks, motion detection, path planning, meanwhile, go on continually in the background.
One of our favorite parts about this technology, however, is the reaction. People seemed genuinely entertained when they first see it and they almost immediately see the value. Our goal is to deliver it within a price envelope which will bring it into reach of most drivers.
A good parking spot shouldn’t be a luxury item.
Reinventing the Car with Software
Arm’s Robert Day explains how software, ML and more powerful silicon are changing driving experiences for the better

Any re-use permitted for informational and non-commercial or personal use only.
Editorial Contact


Latest on X
For Rene Haas, leadership means moving fast, embracing change, and knowing when to pivot.
Speaking with future leaders at @CarnegieMellon, he highlighted the importance of experimentation and learning from fast failure.
🎧 Hear more on Tech Unheard: https://okt.to/Jbgn2E

🆕 We’re expanding Arm Flexible Access to include our first Armv9 edge AI platform, giving innovators low-cost access to the performance, efficiency, & security they need to bring intelligence to every edge device, and drive the next wave of AI innovation: https://okt.to/GyJDV2

“Stay useful, stay flexible and hold the door open for the person behind you.” – Tamika Curry Smith, Arm
Ahead of the #USGP, Arm and the @AstonMartinF1 Team joined forces in Austin to inspire high school and university students through hands-on learning, mentoring, and…



SME2’s integration into @OPPO’s AI framework is a huge step for on-device AI!
Built into the Arm Lumex compute platform, SME2 delivers faster, more efficient AI performance - with a 1.2x performance improvement and 63% reduction in quantization precision loss in OPPO AI’s…




The @nvidia DGX Spark is now available, with leading OEMs launching new AI workstations.
Built on the Arm-based NVIDIA GB10 Grace Blackwell Superchip, these desktop computing systems deliver petaflop-scale AI performance and support for models up to 200B parameters, all…

A calm moment before the doors opened at #OCPSummit25. Since then, the Arm booth has been buzzing with conversations, meetings, and insights on building the Converged AI Datacenter, where performance meets efficiency and collaboration drives innovation.




Designed for AI, Apple's new M5 chip, built on the Arm architecture, delivers major gains in performance and efficiency, bringing next-generation AI experiences to the new Macbook Pro, iPad Pro and Apple Vision Pro - with Arm innovation at the foundation.

Apple unleashes M5, the next big leap in AI performance for Apple silicon
Apple today announced M5, delivering advances to every aspect of the chip and the next big leap in AI.
okt.to
Building on Arm’s appointment to the @OpenComputePrj board, Tech Arena spoke with Eddie Ramirez on how the Foundation Chiplet System Architecture drives openness, interoperability and efficiency across AI infrastructure:
#OCPSummit25

Arm Joins OCP Board, Contributes Chiplet Architecture Spec
Appointment to Open Compute Project Foundation board of directors, contribution of Foundation Chiplet System Architecture ...
okt.to
Edge AI is accelerating faster than ever. ⚡
In the latest Arm Viewpoints podcast, Arm’s SVP and GM of IoT, Paul Williamson and @VDC_Research’s Chris Rommel discuss what’s driving innovation at the edge — from software complexity to smarter system design.…
As vehicles become AI-defined, compute must evolve. 🚘
This week, we contributed the Foundation Chiplet System Architecture (FCSA) to @OpenComputePrj. This lays the groundwork for open, interoperable chiplet design, helping the whole ecosystem move faster.…
Great conversations at #OCPSummit25! 💡
Eddie Ramirez joined partners from Meta, Rebellions, and Novatek to explore how Arm-based chiplets and ecosystem collaboration are shaping a new generation of composable, AI-ready infrastructure.

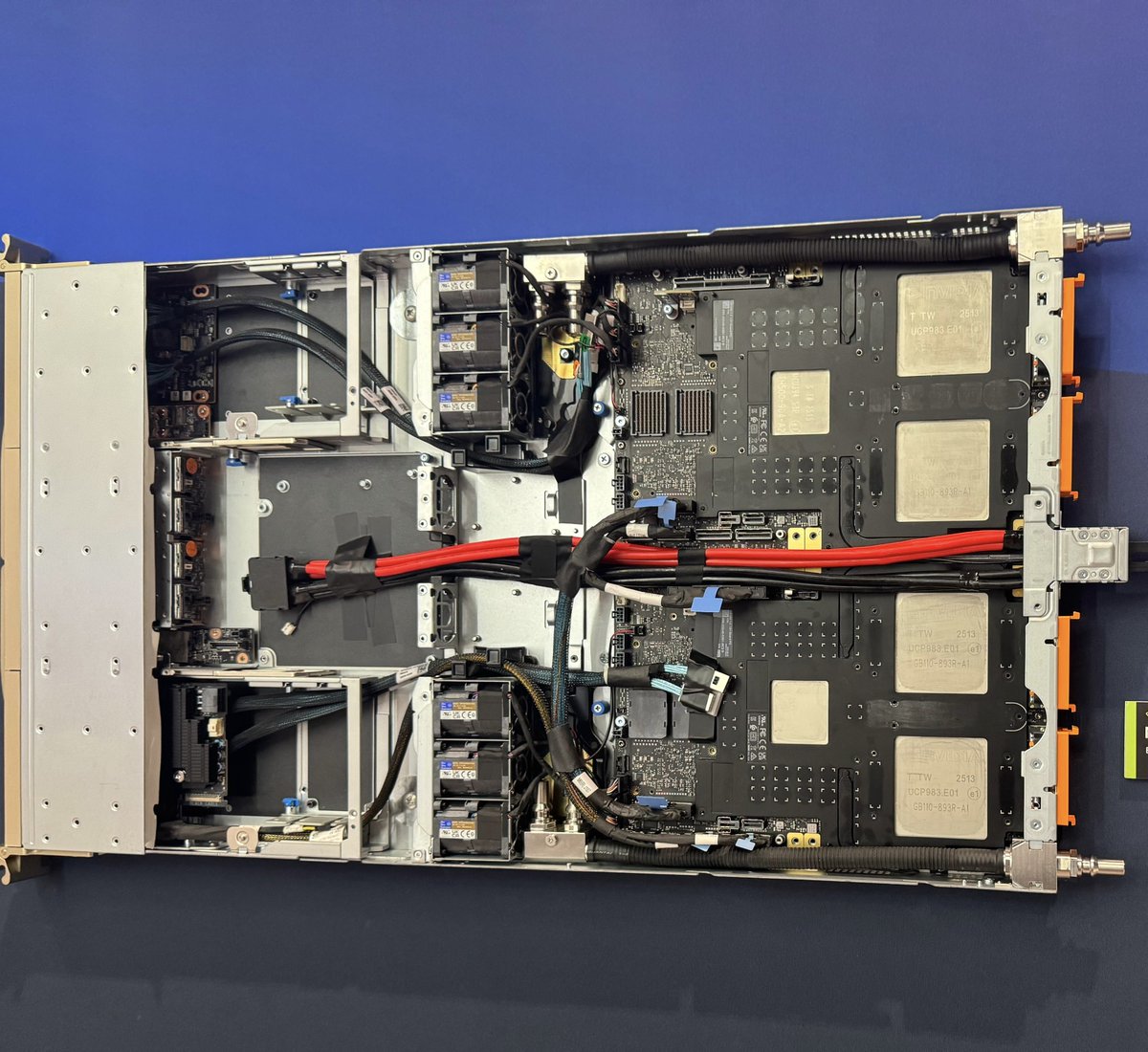
It’s not #OCPSummit25 without the iconic Arm-based hardware and DPU wall. 💪
We've got a seriously impressive line up, featuring:
🔹 @NVIDIA Grace Blackwell GB300
🔹 NeuReality NR1
🔹 Novatek’s Arm Neoverse CSS N2-based SoC
🔹 …and plenty more from Marvell, xSight, and others

Announcing a deepened, strategic partnership with @Meta to drive the next era of AI.
From software to the data center, we’re accelerating our collaboration, combining our power-efficient leadership with Meta’s AI innovation to scale AI everywhere: https://okt.to/v6mhgw

“AI is powering the shift from on-device intelligence to cloud-to-car integration.”
In this #AIToyToTools podcast series, Suraj Gajendra shares how end-to-end AI and standardization are defining the future of automotive innovation.
🎧 Listen now
We’re catching you up on the latest from #OCPSummit25 👇
1️⃣ Mohamed Awad kicked things off this morning with a keynote on how the AI era is transforming the way we build and power the world’s infrastructure.
He highlighted how Arm Total Design, advances in chiplet innovation,…



We’re accelerating the next phase of open, interoperable AI infrastructure.
Announced today at #OCPSummit25 - we've contributed the vendor-neutral FCSA specification to @OpenComputePrj & expanded our Arm Total Design ecosystem to include new capabilities: https://okt.to/I85ZDv

vivo’s new X300 Series launched in the Chinese Market, powered by our V9.3 CPU Cluster and the first to use SME2 for faster on-device AI.
⬆️ Up to 20% faster translation
⬆️ Up to 30% faster gallery search
This marks a leap forward for mobile AI performance.
Congrats…

We've been appointed to the @OpenComputePrj Board of Directors, marking a key step toward the next phase of AI infrastructure. 🎉
We're excited to play our part in advancing open, interoperable designs across the computing ecosystem, represented by Mohamed Awad:…

🗓️ Happening tomorrow at #OCPSummit25!
Mohamed Awad shares how energy-efficient compute, chiplet-based design, and open collaboration are transforming AI and cloud infrastructure — and shaping the next era of the data center.
📍 Tuesday | 09:05am https://okt.to/HBPtCK
Confidence. Curiosity. Belonging.
That’s what fuels careers at Arm. Mamta Thangaraj, started in engineering, stepped into leadership, and now drives our data strategy. Her journey reminds us: when people feel supported, they thrive and innovation follows. https://okt.to/dUsbK4
#OCPSummit25 is almost here!
See how we’re building open, efficient AI data centers with Arm Neoverse, open-chiplet design and production-ready software stacks - all happening at the show.
👉 Catch our speakers
📍 Visit us at booth B11
As the industry evolves from software-defined to AI-defined vehicles, Arm Zena CSS provides the scalable, safety-certified foundation needed to accelerate development of next-generation automotive experiences. 🚗
Discover more in this Automotive Industries feature.…

As AI demands grow, silicon architecture must evolve alongside it.
At #OCPSummit25, we’ll share how Arm Compute Subsystems and the Chiplet System Architecture make building custom silicon for AI faster, modular, and lower risk.
Sneak preview in our blog: https://okt.to/V8axsH

We shared insights from the Tech Unheard podcast, hosted by our CEO Rene Haas, in this @HarvardBiz article.
Conversations with @Scale_AI, @Zoox, @nvidia & Chris Miller (Author of Chip War) reveal 4 signals shaping leadership in the AI era.

Four Strategic Signals Technology Leaders Are Tuning In To - SPONSOR CONTENT FROM ARM
Sponsor content from ARM.
okt.to







